

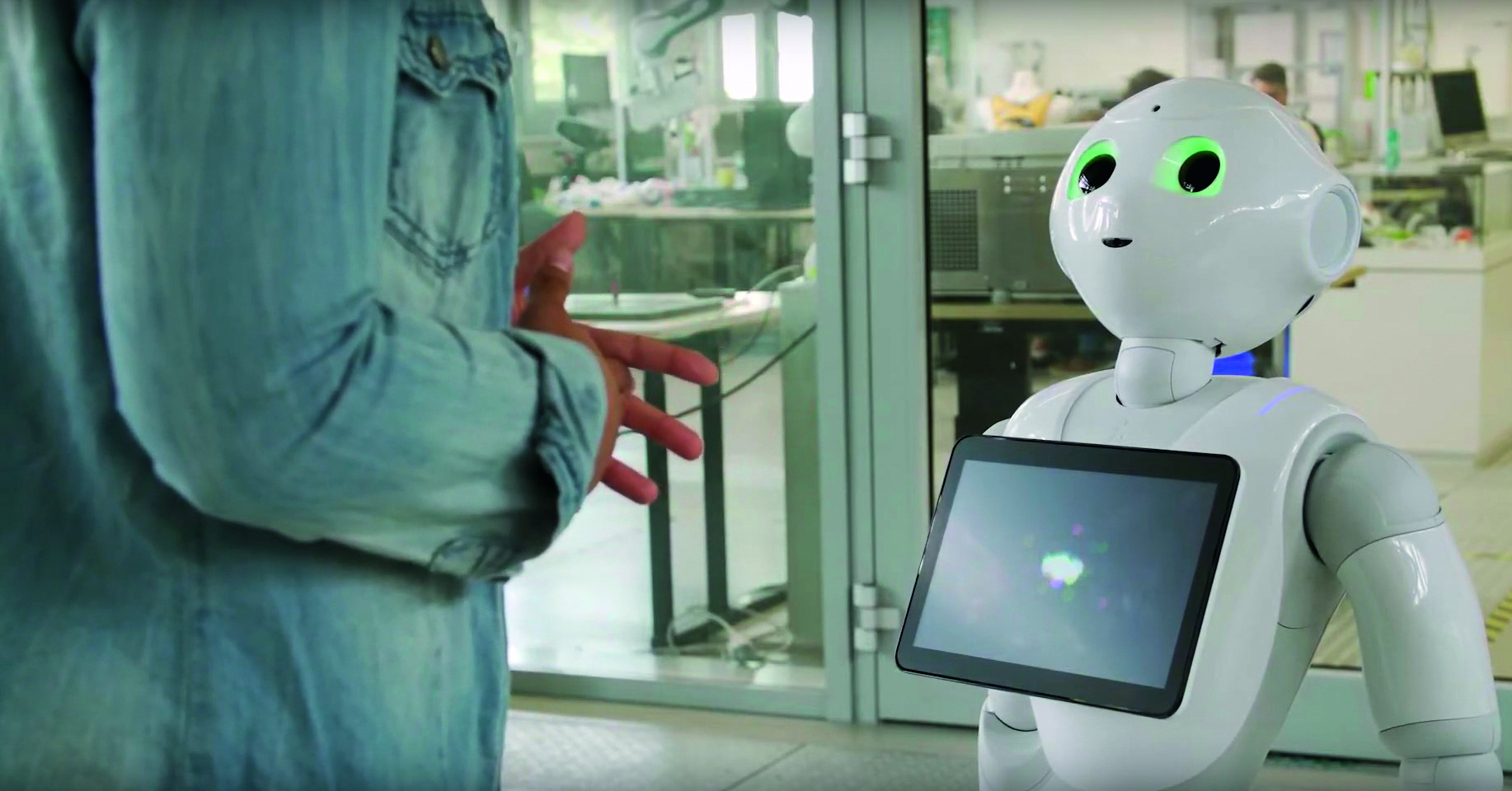
Roboter, die uns im täglichen Leben humorvoll und kompetent unterstützen, sind der Inbegriff vieler Zukunftsvisionen. Obwohl technische Fähigkeiten bereits eine Zusammenarbeit ermöglichen, sind die sozialen Komponenten noch relativ unerforscht. Ziel des Forschungsverbundes ist es daher, soziale Fähigkeiten für Roboter zu untersuchen und zu verbessern.
Die Robotik ist in verschiedenen Anwendungsdomänen eine Schlüsseltechnologie für Wertschöpfung und verbesserte Arbeitsbedingungen, zum Beispiel in der Industrie, in Dienstleistungen, in der Medizin und in der Pflege. Die schlüssige Erweiterung dieses Forschungsfeldes ist die sogenannte „soziale Robotik“. Sie zeichnet sich dadurch aus, dass Roboter – zusätzlich zu ihrem technischen Funktionsumfang – zu einer an die jeweilige Situation angepassten sozialen Kommunikation und Interaktion mit dem Menschen fähig sind. Dies kann viele Formen annehmen und betrifft nicht nur eine Unterhaltung zwischen Roboter und Mensch. Zum Beispiel könnte ein sozialer Roboter, der in einer Fertigungshalle Bauteile transportiert, mittels seiner sozialen Fähigkeiten erkennen, ob ein Mitarbeiter, an dem er vorbeifahren muss, unsicher ist, wie der Roboter auf ihn reagieren wird. Indem der Roboter dem Mitarbeiter signalisiert, dass er ihn erkannt hat und ihm jetzt ausweichen wird, kann der Mitarbeiter entsprechend handeln.

rechts: Roboterassistierte Augenchirurgie an einem Augenmodell (Quelle: Andreas Heddergott /TUM)
Ungelöste Herausforderungen im Bereich der sozialen Robotik liegen derzeit in der Gestaltung einer akzeptierten und ganzheitlichen autonomen sozialen Kommunikation und Interaktion zwischen Roboter und Mensch. Hier muss sichergestellt werden, dass diese so natürlich wie möglich erfolgt, um nicht angsteinflößend auf den Menschen zu wirken. Die Komplexität einer solchen sozialen Kommunikation und Interaktion stellt eine Herausforderung für die technische Umsetzung dar. Zudem entstehen hohe Kosten durch die Anpassung eines sozialen Verhaltens auf unterschiedliche Einsatzszenarien und für unterschiedliche Roboter. Denn derzeit können existierende soziale Verhaltensweisen eines Roboters nicht einfach auf einen anderen Roboter übertragen werden.
Die Vision des Konsortiums in FORSocialRobots besteht darin, dass Mensch und Roboter gemeinsam in flexiblen Teams in allen Bereichen des täglichen Lebens zielführend zusammenarbeiten und neue Roboterapplikationen in kürzester Zeit realisiert werden können. Das Projektkonsortium setzt sich aus sechs wissenschaftlichen, 15 industriellen und sechs assoziierten Partnern zusammen. Der Fokus liegt auf sechs relevanten Anwendungsfeldern (Inspektion, Logistik, Produktion, Service, Seniorenheim und Demenzzentrum) und fünf wissenschaftlichen Teilprojekten (Architektur sozialer Fähigkeiten, sozial situative Kommunikation, sozial adaptive und proaktive Interaktion, Simulation und Validierung sozial kognitiver Roboter im Digitalen Zwilling und Mensch-Roboter-Interaktion im Arbeitskontext). Hier soll der Forschungsverbund einen entscheidenden Beitrag zur Verbesserung der sozialen Fähigkeiten von Robotern leisten und damit deren Wirksamkeit und Akzeptanz bei den potenziellen Nutzern steigern sowie völlig neue technische Entwicklungen unterstützen.