


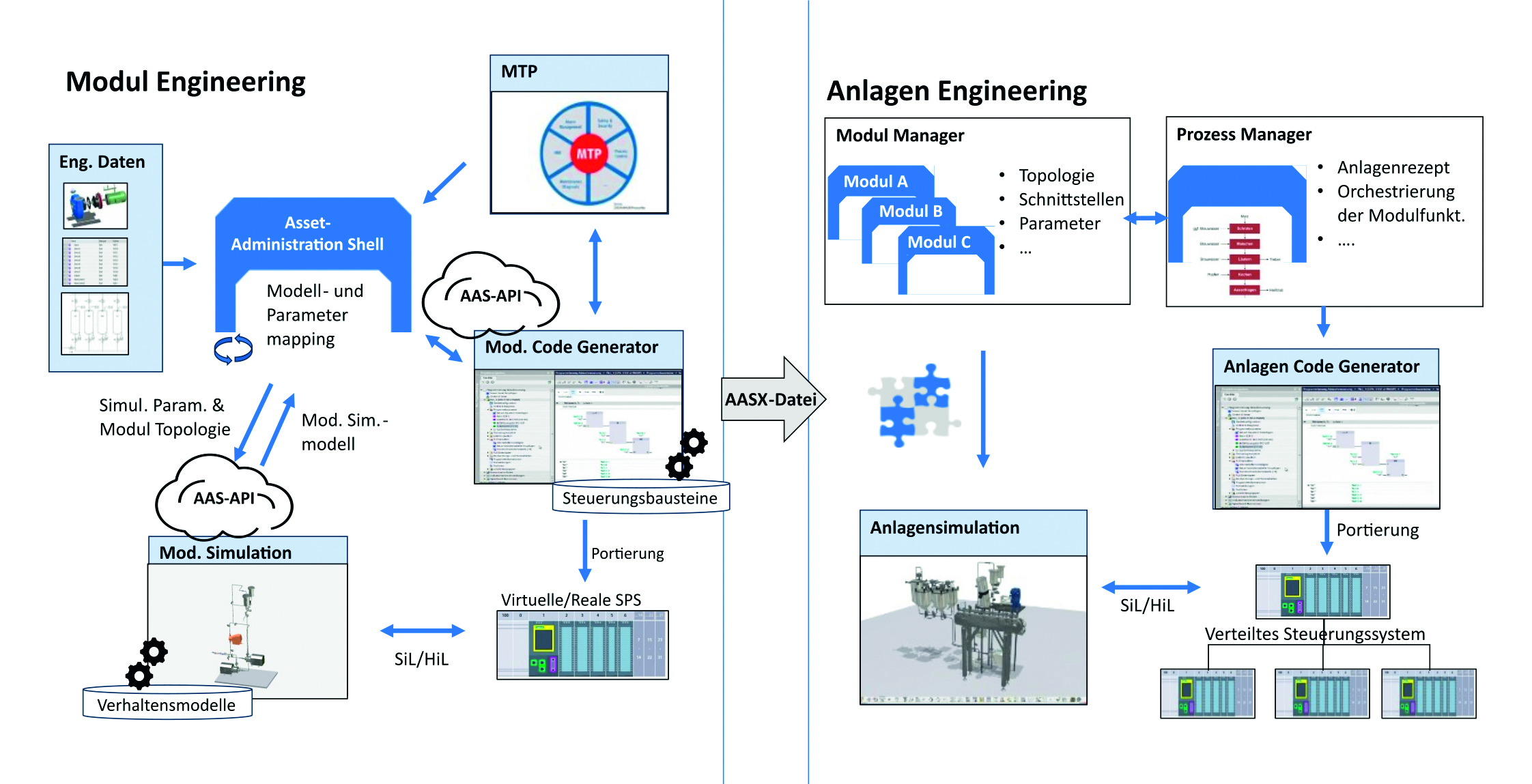
Automatisiertes, modellgestütztes virtuelles Engineering in der Lebensmittelindustrie 4.0 auf Grundlage modularer Anlagenplanungsdaten – virtASI
Steigende Energiekosten, Personalmangel und eine hohe Anlagenkomplexität stellen das Engineering in der Lebensmittelindustrie vor enorme Herausforderungen. Ziel des Forschungsvorhabens virtASI ist es, durch neuartige Simulations- und Automatisierungslösungen das Engineering zu digitalisieren, zu vereinfachen und insgesamt zu verbessern.
