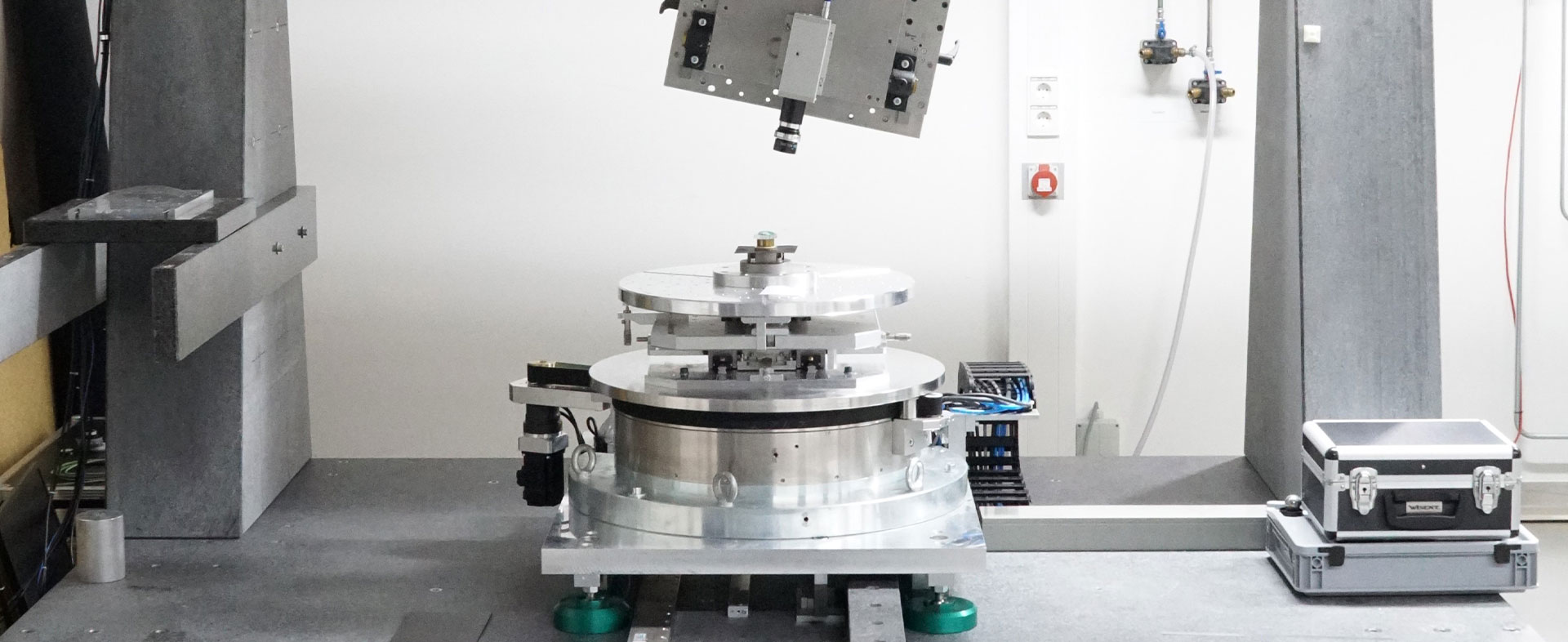


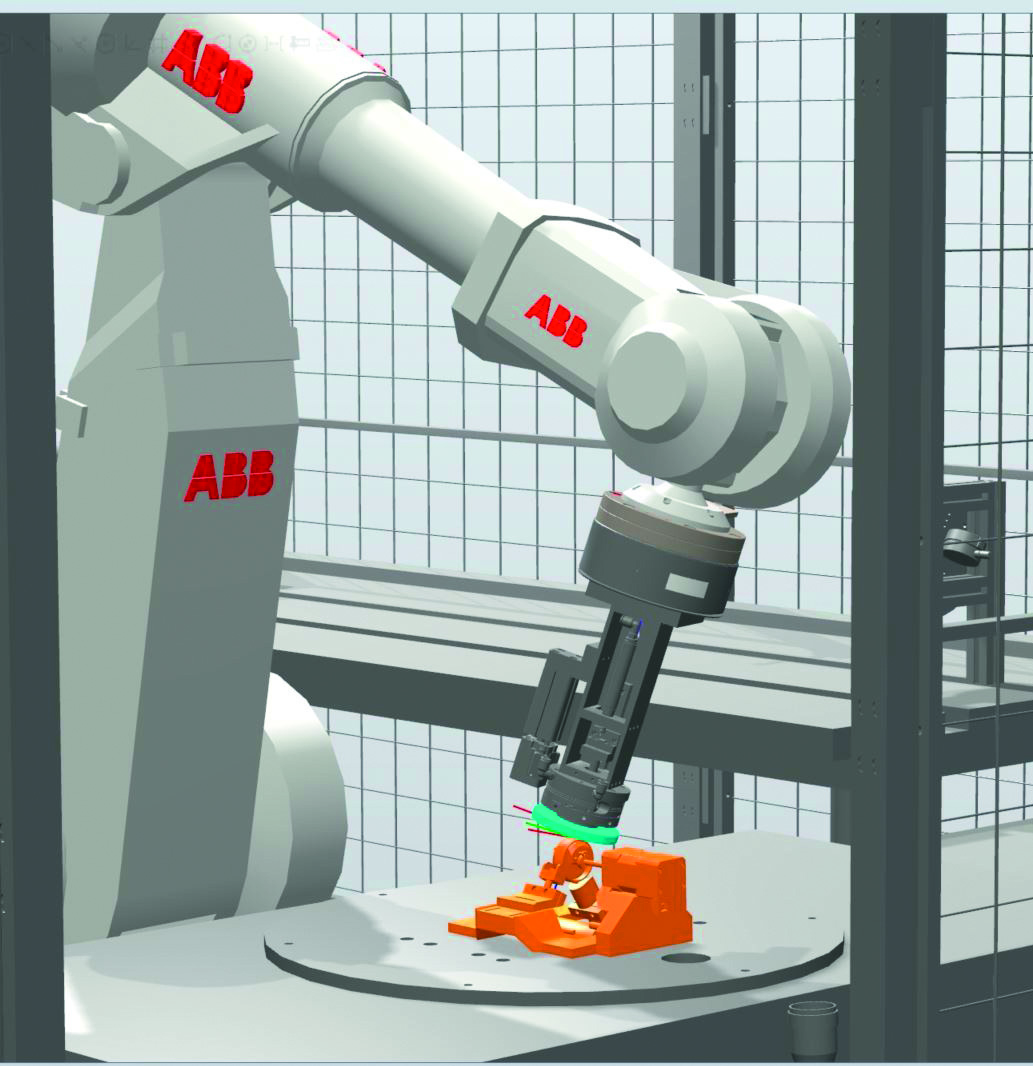
Ziel des Projekts ist die Anwendung der hochpräzisen Finishing-Technologie Polieren mit magnetorheologischen Fluiden (MRF) auf die automatisierte Bearbeitung von optischen Präzisionsbauteilen. Basis ist ein flexibler 6-Achs-Industrieroboter in einer integrierten Fertigungszelle, bestehend aus Bearbeitungs-, Reinigungs- und Messstation.
In einem ersten Schritt wird die Einsetzbarkeit des vorhandenen Roboters für die Positionierung von Werkstücken mit Regelgeometrien (Planflächen, Sphären) an geeigneten Arbeitspunkten eines bereits betriebsbereiten MRF-Systems untersucht: Die Herausforderung für das Oberflächenfinishing ist die präzise Einstellung des Wirkspalts zwischen Poliermittelträger und Werkstückoberfläche, um für alle Oberflächenpunkte des Werkstücks eine deterministische Abtragwirkung im Nanometer-Bereich zu erzielen. Für verschiedene Parametereinstellungen (insbesondere Drehzahl und Magnetfeld), die den Polierabtrag bei der Oberflächenbearbeitung definieren, werden stabile Arbeitspunkte durch statische Poliertests (Bestimmung der Abtragsfunktion) ermittelt und festgelegt.
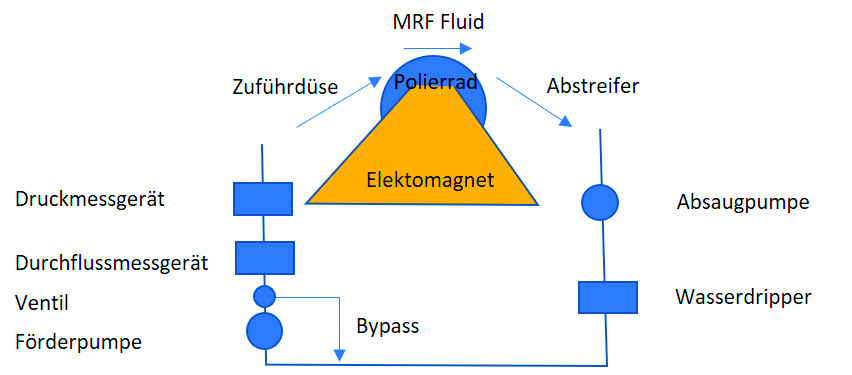
rechts: Schema eines MRF Polieraufbaus. Das Fluid wird auf ein rotierendes Rad befördert und durch einen Elektromagneten zu einem Wulst versteift. In der Kontaktzone mit einem Werkstück geführt wird Materialabtrag geleistet. (Quelle: Technische Hochschule Deggendorf, TC Teisnach – Institut für Präzisionsbearbeitung
und Hochfrequenztechnik (iPH))
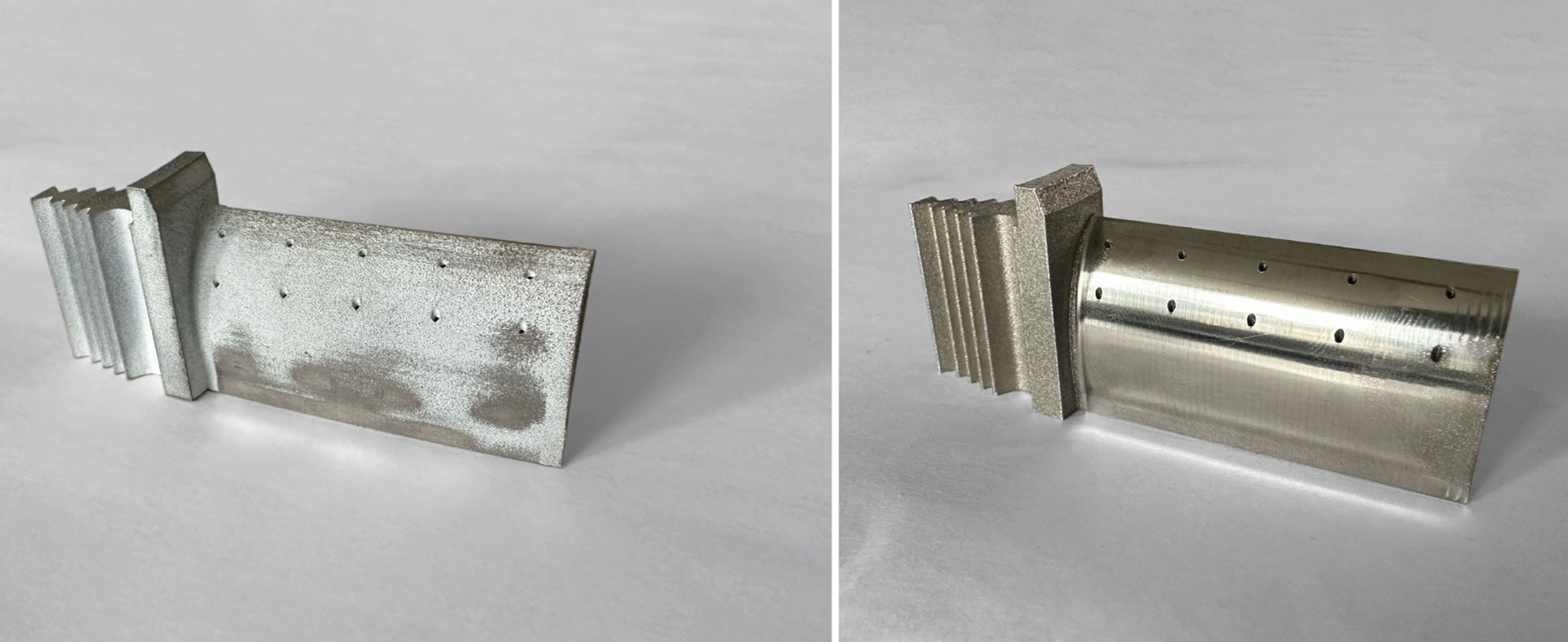
Testbearbeitungen durchführt. Zur Demonstration der Anwendung des Systems auf präzise Oberflächenkorrekturen werden schließlich gezielt Teststrukturen (Sollabtrag) in Bauteiloberflächen eingearbeitet und mit optischen Interferometern vermessen (Istabtrag). Aus dem Vergleich von Soll- und Istabtrag wird die Konvergenz als Maß für die Produktivität der MRF-Finishing-Methode in der Polierzelle ermittelt.
Ein positives Entwicklungsergebnis demonstriert die Einsatzfähigkeit von hochpräzisen MRF-Finishing-Methoden innerhalb von flexiblen roboterbasierten Fertigungszellen, die kostengünstige Prozessautomatisierungen in der Optikindustrie ermöglichen.
