

Automatisierung der elektromechanischen Reanimationshilfe
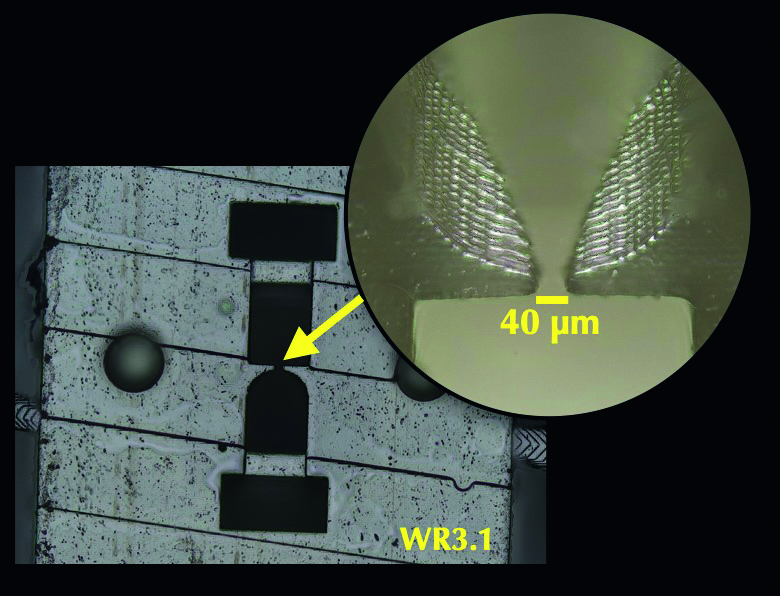
Ziel des Forschungsprojekts war es, Glassubstrate mit einer Dicke von 400 µm mit Durchbrüchen (Vias) zu versehen.
Automatisierung der elektromechanischen Reanimationshilfe Weiterlesen »
Ziel des Forschungsprojekts war es, Glassubstrate mit einer Dicke von 400 µm mit Durchbrüchen (Vias) zu versehen.
Automatisierung der elektromechanischen Reanimationshilfe Weiterlesen »
