

Im Forschungsprojekt präFlott wird ein lernendes System zur vorausschauenden Wartung für vernetzte Geräteflotten entwickelt. Es sagt Fehlerzustände einzelner Geräte vorher. So können Ausfälle reduziert, die Zuverlässigkeit gesteigert und Wartungseinsätze gezielter geplant werden. Insgesamt ermöglicht dies einen effizienteren und umweltschonenderen Betrieb.
Im Kontext von Industrie 4.0 bezeichnet prädiktive Wartung die regelmäßige Beobachtung von Messwerten zur Vorhersage des Maschinenzustandes und damit verbunden eine entsprechend bedarfsgerechte und vorausschauende Wartung. Dies steigert sowohl die Effizienz als auch die Lebensdauer einer Maschine, was Unternehmen und der Umwelt zugutekommt.

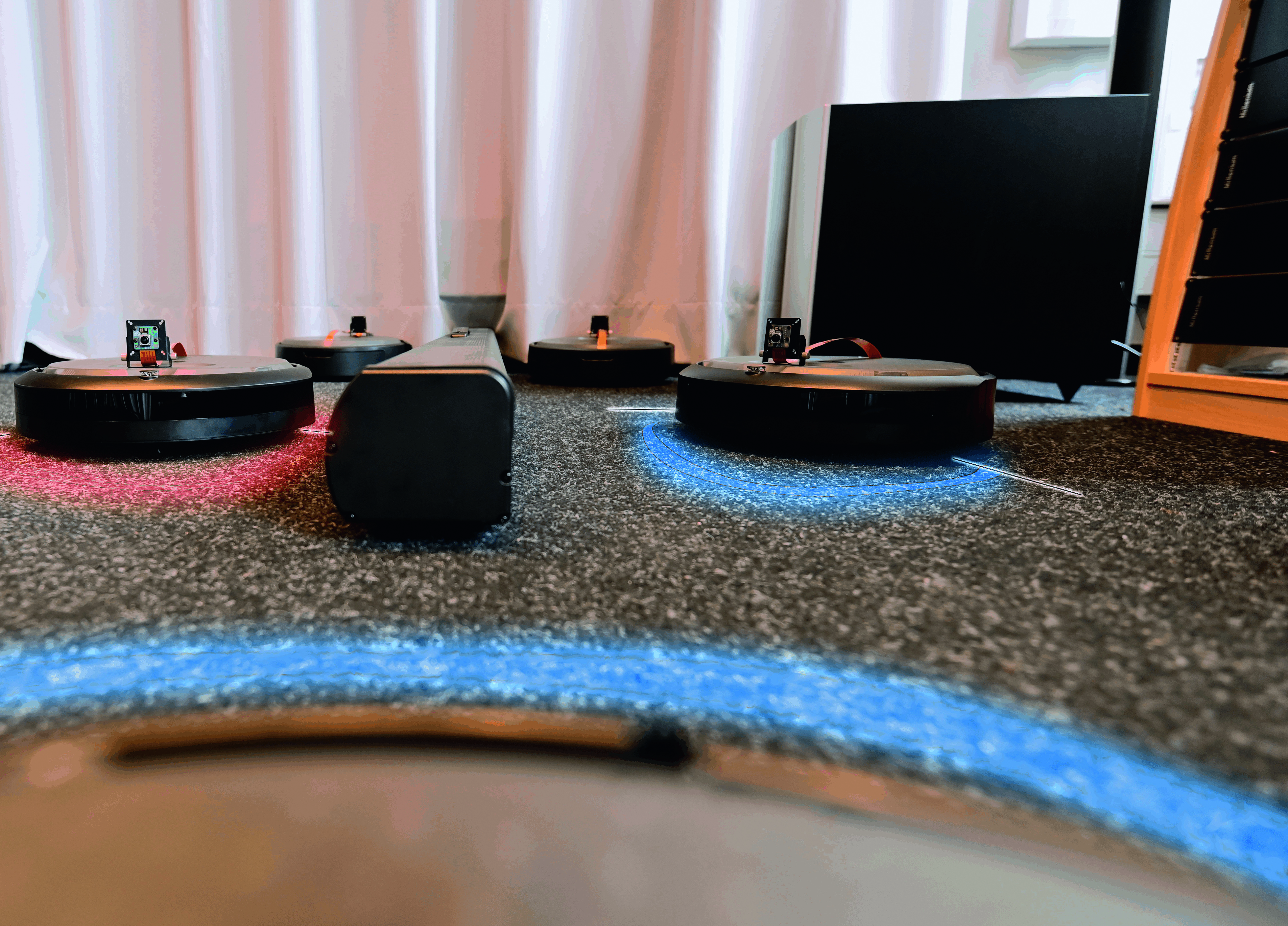
dieser Plattform werden die entwickelten Konzepte und Methoden der prädiktiven Wartung getestet und demonstriert (Quelle: Yongxu Ren, Friedrich-Alexander-Universität Erlangen-Nürnberg
Lehrstuhl für Autonome Systeme und Mechatronik)
dieser Plattform werden die entwickelten Konzepte und Methoden der prädiktiven Wartung getestet und demonstriert (Quelle: Yongxu Ren, Friedrich-Alexander-Universität Erlangen-Nürnberg Lehrstuhl für Autonome Systeme und Mechatronik)
rechts: Gleiches Setup aus der Sicht einer auf dem Roboter montierten Kamera (Quelle: Yongxu Ren, Friedrich-Alexander-Universität Erlangen-Nürnberg Lehrstuhl für Autonome Systeme und Mechatronik)
Industriellen Einsatz findet prädiktive Wartung momentan vor allem für einzelne Maschinen. Im Rahmen des Projekts „Lernende prädiktive Wartung von vernetzten Geräteflotten“ wird gemeinsam mit den Industriepartnern Sielaff GmbH & Co. KG und Dallmeier electronic GmbH & Co. KG ein flottenweites prädikatives Wartungssystem entwickelt. Ziel ist es, den Wartungsbedarf der einzelnen Maschine mit höherer Genauigkeit zu bestimmen, indem die Daten aller in der Flotte vernetzten Geräte betrachtet werden.
Dafür erfolgt zunächst eine zentrale Sammlung der teils vorverarbeiteten Daten der Geräteflotte auf Servern. Diese Daten werden genutzt, um mithilfe aktueller Methoden des maschinellen Lernens und der künstlichen Intelligenz Modelle zu trainieren, die eine Vorhersage von Maschinenzuständen einschließlich potenzieller Fehler ermöglichen. Zur Identifikation und Charakterisierung relevanter (Fehler-)Zustände wird das Wissen von Expertinnen und Experten von Sielaff im Bereich Pfandrücknahmeautomaten und von Dallmeier im Bereich Kamerasysteme herangezogen.
Um auch externen Unternehmen niederschwelligen Zugang zu lernender prädiktiver Wartung vernetzter Geräteflotten zu gewähren, entsteht eine Open-Source-Referenzplattform mit mobilen Robotern. Ausgestattet mit zusätzlichen Sensoren und Aktoren, generieren diese Roboter Daten für das Trainieren der Vorhersagemodelle.