

Die Planung hybrider Mensch-Roboter-Kollaboration (MRK) für Montageprozesse erfordert bislang hohen manuellen Aufwand und spezielles Fachwissen. Bisherige Lösungen basieren meist auf starren Abläufen oder nur begrenzt anpassbaren Prozessstrukturen.
Ziel des KoPro-Projekts war die Entwicklung kombinierbarer Planungs- und Echtzeitalgorithmen für eine adaptive MRK. Dafür wurden semantische Datenmodelle, Interpretations- und Verteilungsalgorithmen sowie Verfahren zur Intentionserkennung und dynamischen Rollenverteilung erforscht. Die Montageanweisungen sollen sich automatisch an individuelle Werkerfähigkeiten anpassen können und über ein digitales Assistenzsystem bereitgestellt werden.
Die Planungsalgorithmen ermöglichen die automatische Ableitung von Montagesequenzen aus Produkt- und Prozessdaten. Dadurch wird der Bedarf an Expertenwissen reduziert. Die Echtzeitkomponente erlaubt eine reaktive Koordination zwischen Mensch und Roboter basierend auf Kontextinformationen.
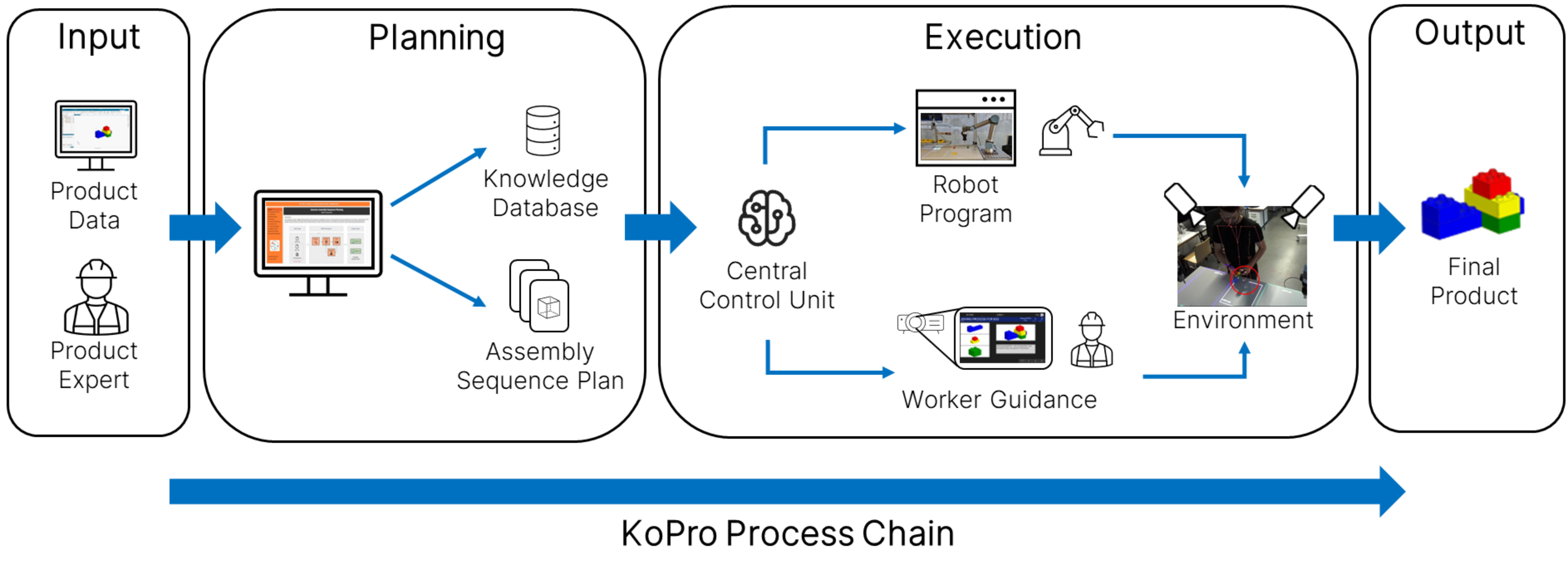
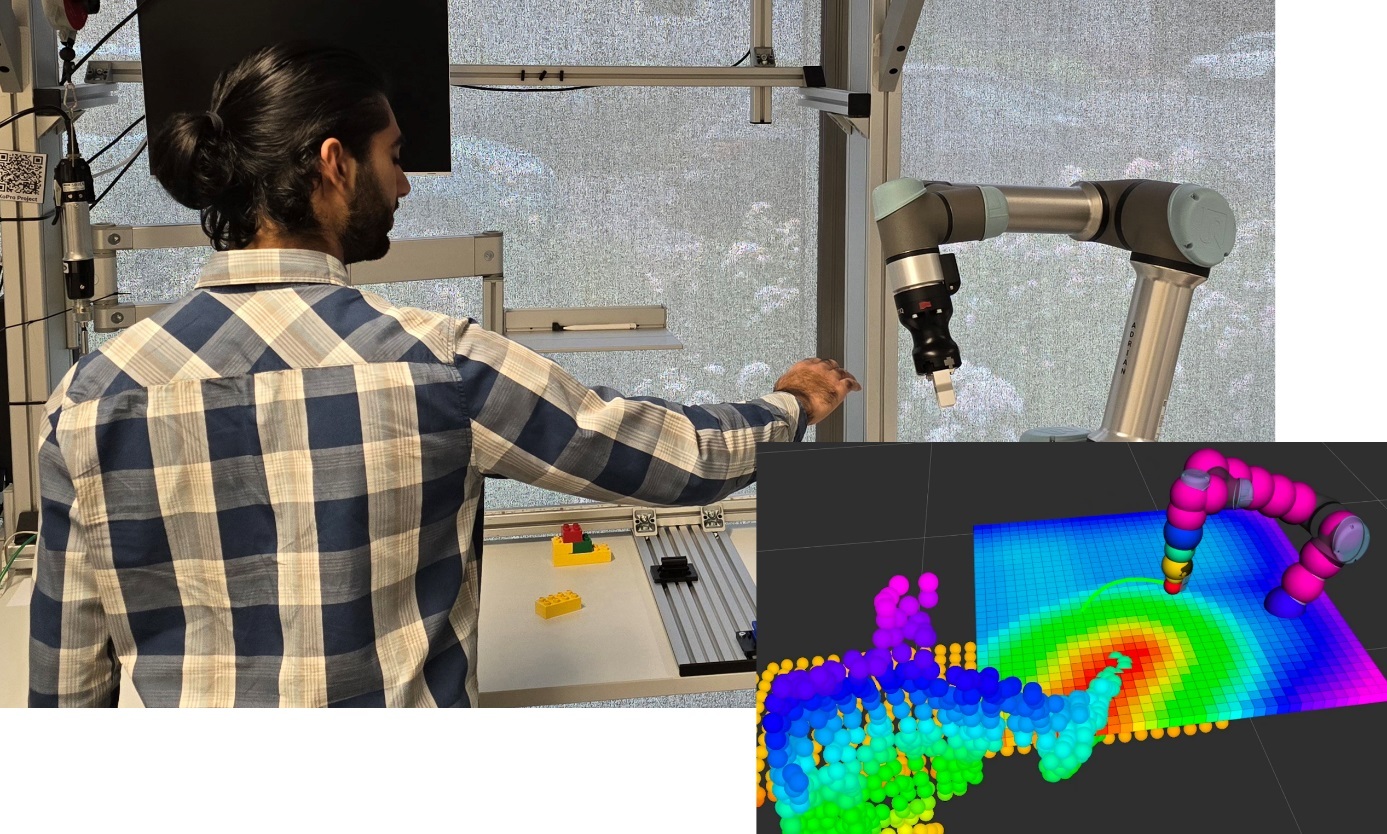
Als Ergebnis des Projekts wurde ein Framework zur Analyse und Erstellung von MRK-Montageplänen entwickelt. Abb. 1 links zeigt den Gesamtprozess von der Planungsphase mit Ablaufplanerstellung bis zur Ausführung mit kamerabasierter Arbeitsraumüberwachung, Robotersteuerung und visueller Unterstützung für Werker. Sicherheitsaspekte flossen in die Planungslogik ein. Verfahren zur Blickanalyse und Anomalieerkennung ermöglichen eine adaptive, kontextabhängige Aufgabenverteilung. Planung, Echtzeitinteraktion (vgl. Abb. 2 rechts) und Assistenzsystem wurden erfolgreich implementiert und validiert. Eine Evaluationsstudie bestätigt die hohe Akzeptanz und Wirksamkeit des Ansatzes.