

Kontinuierliche Silizierung von C/C-Formkörpern (KontiSilizierung)
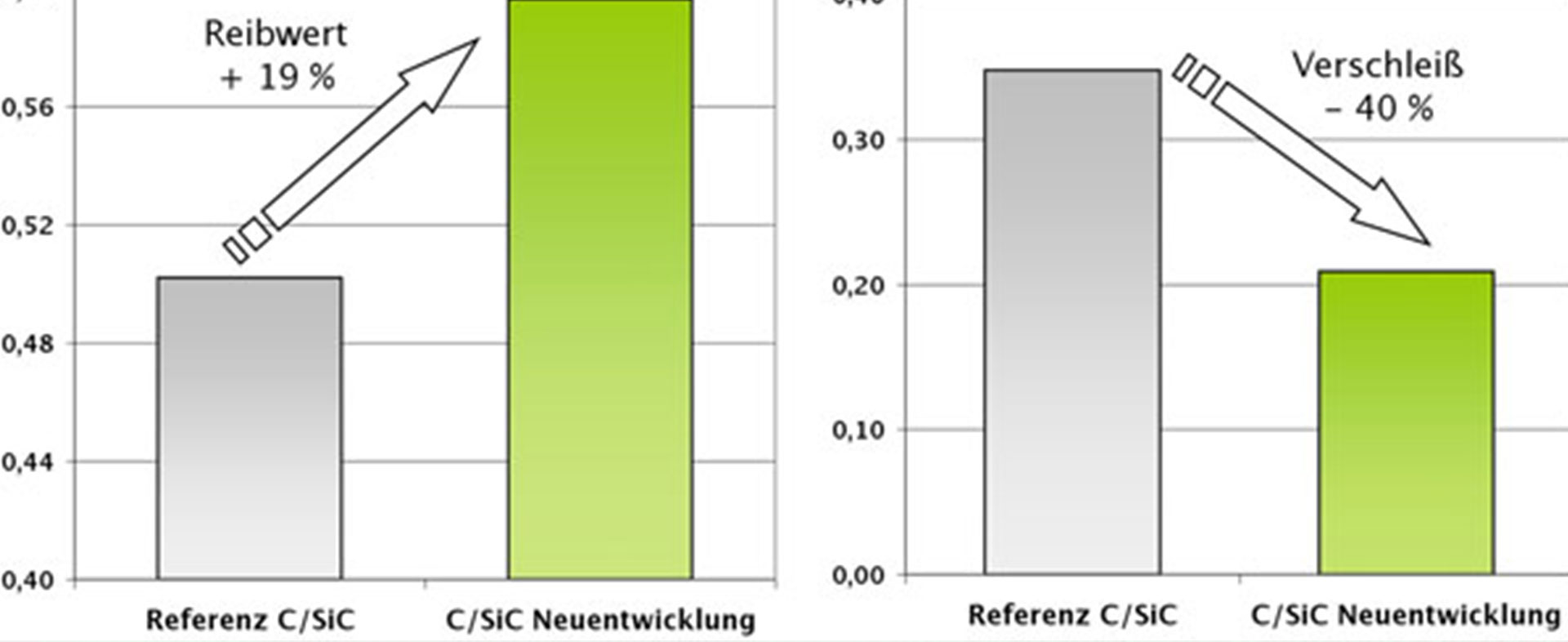
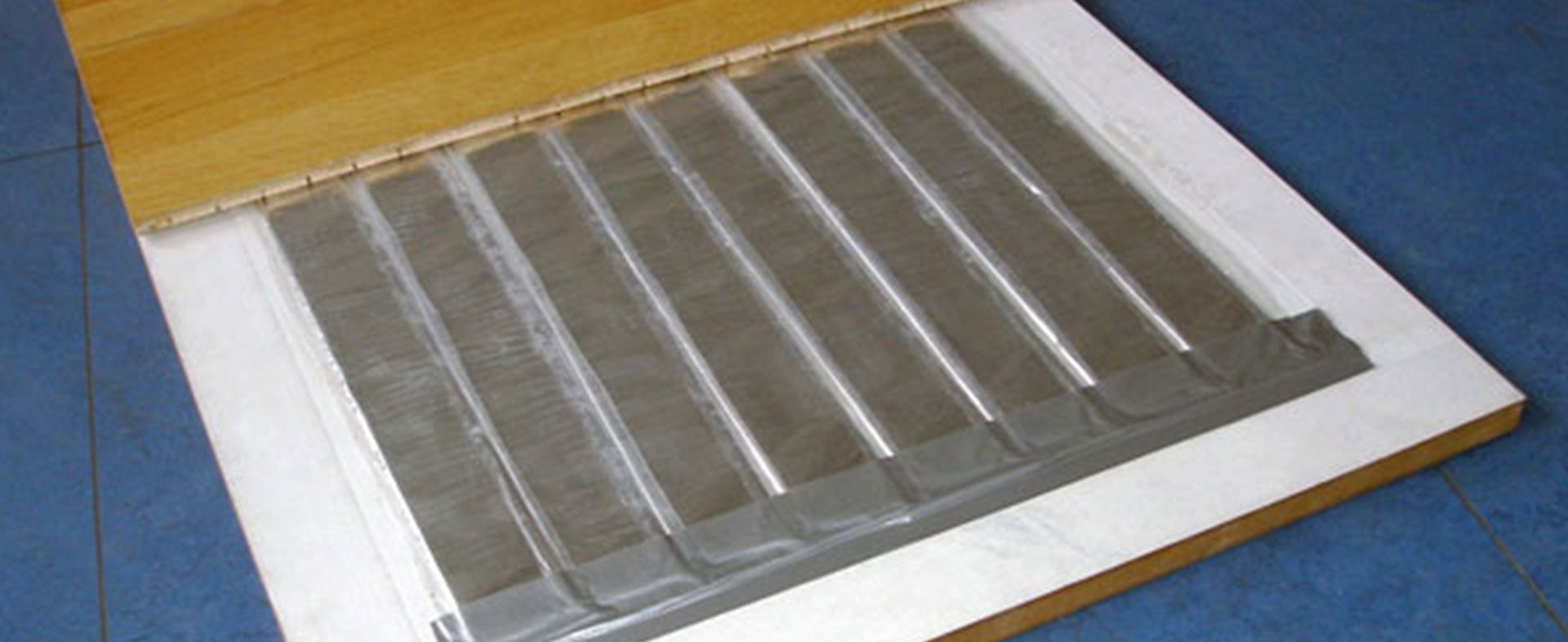
Ziel des Forschungsvorhabens ist die Entwicklung eines kontinuierlichen Schnellsilizierungsverfahrens zur Massenfertigung von Bremsscheiben aus Kohlenstofffaser-verstärktem Siliziumcarbid (C/SiC) für die Automobilindustrie.
Kontinuierliche Silizierung von C/C-Formkörpern (KontiSilizierung) Weiterlesen »