


In der industriellen Fertigung werden Industrieroboter für die Lasermaterialbearbeitung eingesetzt, die aber noch zu träge und ungenau arbeiten. Neue Systemkonzepte sollen diese Schwächen beheben.
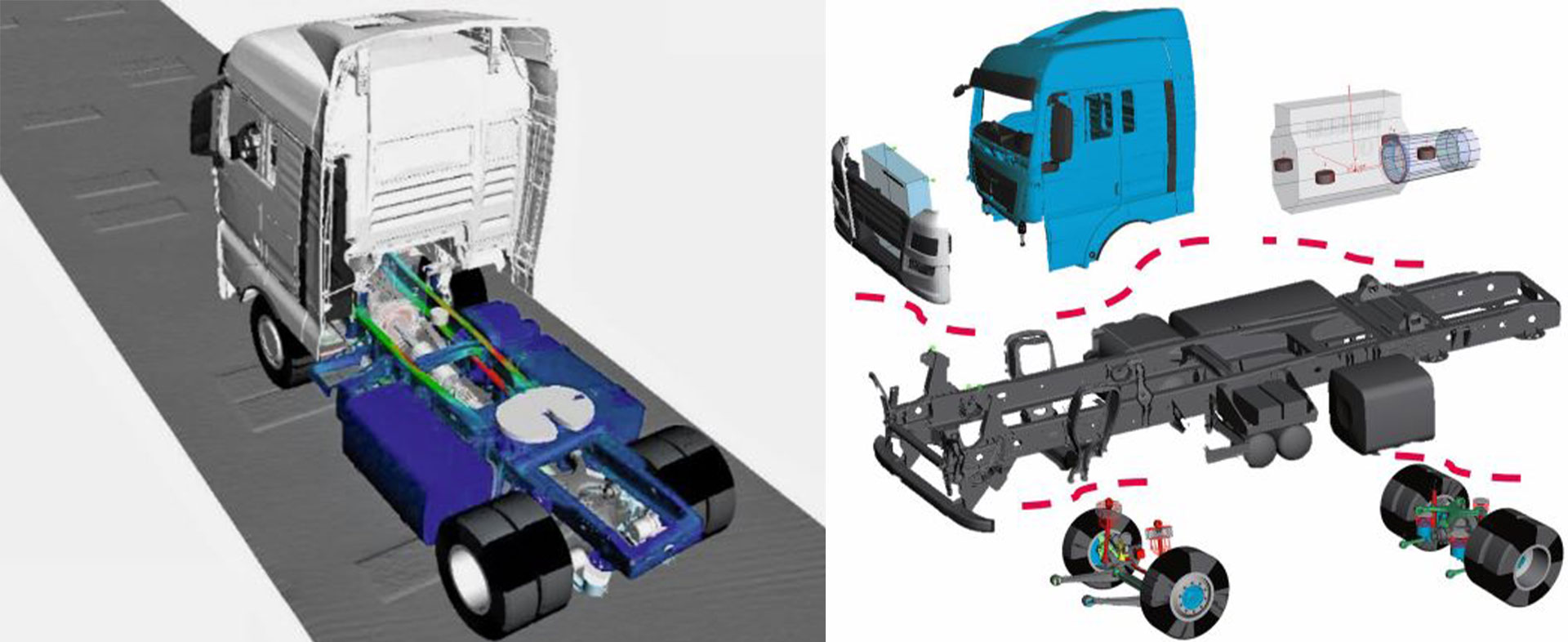
In vielen Bereichen der industriellen Fertigung haben sich Industrieroboter für die Lasermaterialbearbeitung etabliert. Sie werden zum Schneiden, Schweißen, Markieren und Beschriften von Werkstücken aus unterschiedlichsten Materialien verwendet. Bei diesen Bearbeitungsprozessen muss der Fokuspunkt des Laserstrahls sehr schnell auf dem Werkstück positioniert und der gewünschten Bearbeitungskontur möglichst exakt nachgeführt werden.
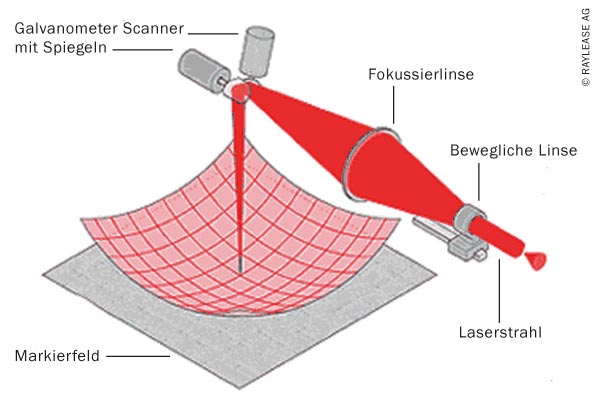
rechts: Laserstrahlablenkeinheit (Laserscanner) (Quelle: Fachhochschule Aschaffenburg)
Aufgrund ihrer mechanischen Trägheit können Industrieroboter die erforderlichen hochdynamischen Bewegungen nur mit Einschränkungen ausführen. In vielen Anwendungsbereichen lassen sich die Anforderungen hinsichtlich Dynamik und Genauigkeit der Strahlführung nur erfüllen, wenn ergänzend ein optisches Ablenksystem zum Einsatz kommt.
Im Projekt Larissa (LaserRobotik – Integration von Scan- und Fokussiereinheiten als hochdynamische System-Achsen) werden neuartige Systemkonzepte für die Lasermaterialbearbeitung mit Industrierobotern entwickelt und erprobt. Die Bewegungsführung des Laserstrahls soll gemeinsam von den mechanischen Achsen des Roboters sowie einer mitgeführten optischen Scan- und Fokussiereinheit übernommen werden.
Die Teilsysteme Roboter und Laserscanner besitzen hinsichtlich Dynamik, Genauigkeit und Größe des Arbeitsraums komplementäre Eigenschaften. Durch die Entwicklung einer übergreifenden Steuerung soll erreicht werden, dass die beiden Teilsysteme sich optimal ergänzen. Im vorgesehenen Steuerungsansatz sollen die (langsamen) grobmotorischen Anteile der Fokuspunkt-Bewegung durch die eher träge Roboterkinematik realisiert werden, während die schnellen optischen Achsen des Laserscanners diejenigen Bewegungsanteile übernehmen, die eine hohe Dynamik, aber nur geringe Bewegungshübe erfordern.